Author: Denis Avetisyan
Researchers have developed a novel control method that enhances the safety and reliability of complex systems by proactively addressing potential hazards.
This review details a robust Taylor-Lagrange Control method leveraging higher-order expansions and reachability analysis to enforce safety constraints and mitigate the effects of inter-sampling.
Ensuring safety in complex nonlinear control systems remains a significant challenge despite advancements in methods like Control Barrier Functions, which offer sufficient but not necessary conditions for stability. This paper introduces a robust Taylor-Lagrange Control (rTLC) method, detailed in ‘Robust Taylor-Lagrange Control for Safety-Critical Systems’, to address limitations of existing approaches and mitigate the feasibility preservation problem arising from effects like inter-sampling. By leveraging higher-order Taylor expansions with Lagrange remainders, rTLC explicitly incorporates current-time control actions, simplifying implementation with a single hyperparameter. Does this streamlined approach represent a substantial step towards more reliable and efficient safety-critical control design?
Navigating Complexity: The Limits of Conventional Control
Conventional control strategies, while effective for simpler systems, frequently encounter limitations when applied to increasingly complex scenarios and unpredictable external factors. These methods often rely on precise mathematical models and assumptions about system behavior, which can break down in the face of real-world disturbances or model inaccuracies. Consequently, systems governed by these traditional approaches are susceptible to instability-where small disturbances amplify into runaway behavior-or constraint violations, meaning they operate outside of predefined safe boundaries. This is particularly problematic in critical applications like robotics, aerospace, and autonomous vehicles, where even minor deviations from desired behavior can have significant consequences, highlighting the urgent need for control methodologies that can gracefully handle uncertainty and ensure reliable performance despite unforeseen challenges.
Maintaining operational safety – ensuring a system consistently remains within predefined boundaries – becomes increasingly difficult as system complexity grows. This challenge arises because intricate systems exhibit a vast number of interacting components and potential failure modes, making it difficult to anticipate and mitigate all possible hazards. Traditional safety measures, often reliant on simplified models or conservative estimations, may become inadequate when confronted with unforeseen disturbances or intricate dynamics. Consequently, a system designed to operate safely under nominal conditions could easily violate safety constraints when exposed to real-world complexities. This necessitates the development of advanced control strategies capable of not only regulating performance but also demonstrably guaranteeing safe operation even in the face of uncertainty and evolving conditions.
Conventional control techniques, while effective in many applications, increasingly falter when confronted with the intricacies of modern systems and the inevitability of external disturbances. This inadequacy stems from a reliance on assumptions that rarely hold true in real-world scenarios, potentially leading to performance degradation or, critically, safety violations. Consequently, research is heavily focused on developing control strategies that move beyond simply reacting to disturbances and instead guarantee safe operation, even in the face of uncertainty. These advanced approaches emphasize formal verification-mathematically proving that a system will always remain within its defined safety limits-and robustness, ensuring reliable performance despite unforeseen circumstances. The pursuit of provably safe control represents a fundamental shift, moving from empirical testing to rigorous, mathematically-grounded assurance of system integrity and dependable operation.
Control Barrier Functions: Architecting Inherent Safety
Control Barrier Functions (CBFs) facilitate the incorporation of safety specifications directly into a controller’s design by formulating constraints on the system’s state and input. These constraints are expressed as a function, h(x), where h(x) \ge 0 indicates the system remains within a defined safe set. The CBF is then utilized within a control barrier certificate, ensuring that the time derivative of h(x) remains non-negative, i.e., \dot{h}(x) \ge 0, effectively preventing the system from violating the safety constraint during operation. This approach contrasts with traditional methods that often treat safety as an afterthought, and allows for provable safety guarantees during trajectory tracking and regulation.
Invariance, as applied within the framework of Control Barrier Functions (CBFs), refers to the property that a system, once contained within a defined safe set, will remain within that set for all future times. This is mathematically enforced by ensuring that the rate of change of a continuously differentiable function, representing the safe set boundary, is non-negative while the system is within the safe region. Specifically, the CBF construction guarantees that disturbances and model uncertainties will not cause the system to violate safety constraints, provided an initial condition resides within the defined safe set and the CBF is appropriately designed for the system dynamics. This is achieved by formulating the control problem to actively counteract any tendencies that would lead the system state toward the boundary of the safe set, effectively maintaining the invariant property.
Systems with higher relative degree-defined as the number of derivatives of the control input required to directly affect the output-present challenges for standard Control Barrier Function (CBF) implementation. Traditional CBFs directly constrain the rate of change of the output. Higher-Order CBFs address this by extending the invariance condition to encompass not only the output itself, but also its successive derivatives up to the relative degree. This is achieved by constructing a CBF that incorporates these higher-order derivatives, ensuring that the system’s trajectory remains safe with respect to the defined constraints on these derivatives. Specifically, the time derivative of the higher-order CBF must remain non-negative to guarantee safety, effectively controlling more complex system dynamics and expanding the applicability of safety-critical control design to a wider range of systems. \dot{h}(x) \geq 0
Taylor-Lagrange Control: Bridging the Gap Between Theory and Reality
Taylor-Lagrange Control extends Control Barrier Function (CBF) methodologies by representing system dynamics using Taylor series expansions. This allows for the approximation of complex, potentially unknown, dynamics with a polynomial function. Crucially, the method incorporates the Lagrange remainder term, R_n(x), to explicitly quantify the error introduced by truncating the Taylor series after n terms. The Lagrange remainder, dependent on the system state x and the truncation order, provides a bound on the approximation error and is central to ensuring safety guarantees are maintained despite model inaccuracies. By controlling the magnitude of R_n(x), the controller can compensate for unmodeled dynamics and disturbances, maintaining stability and constraint satisfaction.
Taylor-Lagrange Control facilitates the development of safety-guaranteeing controllers by explicitly addressing modeling uncertainties and external disturbances. Traditional control methods often assume perfect knowledge of system dynamics, a condition rarely met in real-world applications. This approach incorporates bounds on the error between the approximated system dynamics – using Taylor series expansion – and the true dynamics, quantified by the Lagrange remainder. By designing controllers that minimize the influence of this remainder, the system’s state can be maintained within predefined safe sets despite inaccuracies in the model or the presence of disturbances. This is achieved by formulating control constraints that account for both the approximated dynamics and the estimated upper bound on the approximation error, effectively providing robustness against unmodeled effects.
Taylor-Lagrange Control manages safety despite model inaccuracies by explicitly bounding the Lagrange remainder term, which represents the error introduced by truncating the Taylor series expansion of the system dynamics. This remainder, R_n, is systematically controlled through controller design to ensure it remains within predefined safety constraints. Specifically, the controller parameters are tuned such that |R_n(x)| \le \gamma, where γ is a user-defined safety margin. By keeping the remainder bounded, the controller guarantees that the actual system behavior, even with modeling errors, will not violate established safety specifications, providing robustness against uncertainties and disturbances.
Robust Taylor-Lagrange Control: Confronting the Discrete-Time Imperative
The core challenge in translating control algorithms designed for continuous systems into real-world applications lies in the inherent discrepancy between continuous-time dynamics and the discrete nature of digital implementation – a phenomenon known as the inter-sampling effect. Traditional Taylor-Lagrange Control (TLC) methods often overlook this critical detail, potentially leading to instability or safety violations when deployed on physical systems. Robust Taylor-Lagrange Control directly confronts this issue by explicitly modeling and compensating for the inter-sampling effect through higher-order Taylor expansions and Lagrange remainder analysis. This approach effectively accounts for the information lost during the discretization process, ensuring that the controller’s behavior accurately reflects the intended continuous-time dynamics and maintains stability even when subjected to the limitations of discrete-time execution. By addressing this fundamental discrepancy, rTLC provides a more reliable and predictable control solution for practical applications.
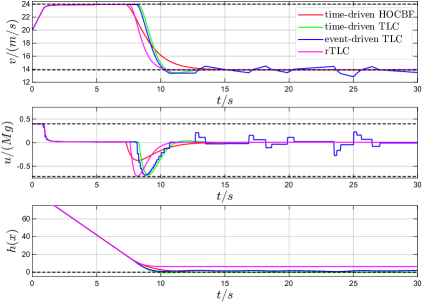
The inherent discrepancy between continuous-time control designs and their discrete-time implementation – known as the inter-sampling effect – poses a significant challenge to the reliable operation of time-driven Taylor-Lagrange Control (TLC). To address this, Robust Taylor-Lagrange Control leverages higher-order Taylor expansions to more accurately approximate the system’s behavior between sampling instants. Crucially, this expansion is coupled with Lagrange remainder analysis, which provides a rigorous bound on the approximation error. By explicitly accounting for and limiting this error, the method successfully mitigates the destabilizing effects of the inter-sampling phenomenon, demonstrably avoiding safety violations that commonly plague standard time-driven TLC implementations and ensuring stable, reliable control performance.
Robust Taylor-Lagrange Control, or rTLC, distinguishes itself through exceptional simplicity in implementation, requiring adjustment of only a single hyperparameter to ensure stable and safe system operation. This stands in stark contrast to event-triggered control strategies and competing methodologies that often demand the tuning of multiple parameters, significantly increasing complexity and computational burden. Validated through comprehensive adaptive cruise control simulations, rTLC consistently demonstrates successful safety constraint satisfaction despite disturbances and model uncertainties, achieving robust performance with minimal user intervention and streamlined design. This balance between efficacy and simplicity positions rTLC as a particularly promising approach for real-world applications where ease of implementation is paramount.
Looking Ahead: Towards Autonomous Systems We Can Trust
A compelling synergy arises when Control Barrier Functions (CBFs) are integrated with Robust Taylor-Lagrange Control, yielding a powerful architecture for the design of safety-critical systems. CBFs formally encode desired safety constraints, guaranteeing that the system remains within a defined safe set during operation; however, enforcing these constraints can be computationally demanding. Robust Taylor-Lagrange Control offers a method for approximating complex nonlinear systems with polynomial representations, while simultaneously providing robustness to uncertainties and disturbances. This combination allows for the efficient and reliable enforcement of CBF constraints, even in challenging dynamical regimes. The resulting framework facilitates the creation of control policies that not only achieve desired tasks but also demonstrably guarantee safety, offering a significant advancement in the development of autonomous robots, aircraft, and other safety-sensitive applications where predictable and reliable behavior is paramount.
Current investigations are actively exploring event-triggered control strategies as a means of optimizing the performance of safety-critical systems. These approaches depart from traditional continuous control by initiating updates and communications only when a significant event – a deviation exceeding a predefined threshold – occurs. This selective activation dramatically reduces the computational demands on processors and minimizes the volume of data transmitted across networks, offering substantial benefits for resource-constrained platforms like drones or embedded robotics. Researchers are particularly focused on designing event triggers that maintain stability and safety guarantees while minimizing the frequency of updates, a delicate balance achieved through careful analysis of system dynamics and the development of adaptive triggering mechanisms. Ultimately, the successful integration of event-triggered control promises to unlock greater efficiency and scalability for autonomous systems operating in complex and dynamic environments.
The convergence of Control Barrier Functions and Robust Taylor-Lagrange Control promises a paradigm shift in the capabilities of autonomous systems and robotics. These techniques move beyond traditional control methods by prioritizing safety and resilience, allowing robots to navigate and operate effectively even amidst uncertainties and disturbances in complex, real-world environments. This enhanced reliability unlocks applications previously deemed too risky – from collaborative robots working alongside humans in unpredictable settings, to fully autonomous vehicles operating in dynamic urban landscapes, and even advanced surgical robotics requiring absolute precision and fail-safe mechanisms. Ultimately, this advanced control framework isn’t simply about automating tasks; it’s about building trust and enabling the widespread adoption of autonomous technologies by ensuring predictable, safe, and efficient operation in previously inaccessible domains.
The pursuit of safety in complex, nonlinear systems demands more than simply achieving a desired trajectory; it requires a rigorous understanding of system boundaries and potential disturbances. This work, introducing robust Taylor-Lagrange Control, exemplifies this principle. It’s akin to sculpting a solution, refining it with higher-order expansions to anticipate and mitigate unforeseen challenges, such as the inter-sampling effect. As Richard Feynman once stated, “The first principle is that you must not fool yourself – and you are the easiest person to fool.” This sentiment resonates deeply with the meticulous approach presented; rTLC doesn’t rely on arbitrary tuning but rather on a foundational understanding of system dynamics, ensuring genuine robustness and a respect for the inherent complexities involved in safety-critical control.
Beyond the Horizon
The presented work achieves a notable economy – safety guarantees without a proliferation of tuning knobs. Yet, the very act of expanding in Taylor series, however judiciously truncated, implies a locality of control. The system “believes” it operates within a defined, smooth region. The true test, of course, lies in the inevitable encounter with the unexpected – the sudden disturbance, the unforeseen state. Future efforts must address the graceful degradation of performance as one ventures beyond the radius of well-behaved approximation. Code structure is composition, not chaos; the same principle applies to control law construction.
Furthermore, the current formulation, while elegantly handling inter-sampling effects, remains tethered to a specific notion of “safety” defined by Control Barrier Functions. Expanding the framework to encompass more nuanced safety criteria – perhaps probabilistic constraints or risk-sensitive formulations – would broaden its applicability. The challenge is not merely to prevent unsafe states, but to manage the likelihood of their occurrence with quantifiable assurance.
Ultimately, the pursuit of robust control is a search for invariant principles. Beauty scales, clutter does not. The elegance of a solution isn’t measured by its complexity, but by the simplicity with which it captures fundamental truths about the system it governs. The path forward lies in distilling these principles, and in building control architectures that are resilient not just to known disturbances, but to the unknown unknowns that inevitably lie ahead.
Original article: https://arxiv.org/pdf/2602.20076.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- All Skyblazer Armor Locations in Crimson Desert
- All Shadow Armor Locations in Crimson Desert
- How to Get the Sunset Reed Armor Set and Hollow Visage Sword in Crimson Desert
- Marni Laser Helm Location & Upgrade in Crimson Desert
- Best Bows in Crimson Desert
- All Helfryn Armor Locations in Crimson Desert
- All Golden Greed Armor Locations in Crimson Desert
- How to Craft the Elegant Carmine Armor in Crimson Desert
- Keeping Large AI Models Connected Through Network Chaos
- One Piece Chapter 1179 Preview: The Real Imu Arrives in Elbaf
2026-02-25 00:18